cimpy.cgmes_v2_4_15.PssIEEE1A module
- class cimpy.cgmes_v2_4_15.PssIEEE1A.PssIEEE1A(a1=0.0, a2=0.0, inputSignalType=None, ks=0.0, t1=0.0, t2=0.0, t3=0.0, t4=0.0, t5=0.0, t6=0.0, vrmax=0.0, vrmin=0.0, *args, **kw_args)[source]
The class represents IEEE Std 421.5-2005 type PSS1A power system stabilizer model. PSS1A is the generalized form of a PSS with a single input. Some common stabilizer input signals are speed, frequency, and power. Reference: IEEE 1A 421.5-2005 Section 8.1.
- a1:
PSS signal conditioning frequency filter constant (A1). Typical Value = 0.061. Default: 0.0
- a2:
PSS signal conditioning frequency filter constant (A2). Typical Value = 0.0017. Default: 0.0
- inputSignalType:
Type of input signal. Typical Value = rotorAngularFrequencyDeviation. Default: None
- ks:
Stabilizer gain (Ks). Typical Value = 5. Default: 0.0
- t1:
Lead/lag time constant (T1). Typical Value = 0.3. Default: 0.0
- t2:
Lead/lag time constant (T2). Typical Value = 0.03. Default: 0.0
- t3:
Lead/lag time constant (T3). Typical Value = 0.3. Default: 0.0
- t4:
Lead/lag time constant (T4). Typical Value = 0.03. Default: 0.0
- t5:
Washout time constant (T5). Typical Value = 10. Default: 0.0
- t6:
Transducer time constant (T6). Typical Value = 0.01. Default: 0.0
- vrmax:
Maximum stabilizer output (Vrmax). Typical Value = 0.05. Default: 0.0
- vrmin:
Minimum stabilizer output (Vrmin). Typical Value = -0.05. Default: 0.0
Documentation of parent class PowerSystemStabilizerDynamics:
Power system stabilizer function block whose behaviour is described by reference to a standard model
- ExcitationSystemDynamics:
Excitation system model with which this power system stabilizer model is associated. Default: None
- RemoteInputSignal:
Remote input signal used by this power system stabilizer model. Default: “list”
Documentation of parent class DynamicsFunctionBlock:
Abstract parent class for all Dynamics function blocks.
- enabled:
Function block used indicator. true = use of function block is enabled false = use of function block is disabled. Default: False
Documentation of parent class IdentifiedObject:
This is a root class to provide common identification for all classes needing identification and naming attributes.
- DiagramObjects:
The domain object to which this diagram object is associated. Default: “list”
- description:
The description is a free human readable text describing or naming the object. It may be non unique and may not correlate to a naming hierarchy. Default: ‘’
- energyIdentCodeEic:
The attribute is used for an exchange of the EIC code (Energy identification Code). The length of the string is 16 characters as defined by the EIC code. References: Default: ‘’
- mRID:
Master resource identifier issued by a model authority. The mRID is globally unique within an exchange context. Global uniqueness is easily achieved by using a UUID, as specified in RFC 4122, for the mRID. The use of UUID is strongly recommended. For CIMXML data files in RDF syntax conforming to IEC 61970-552 Edition 1, the mRID is mapped to rdf:ID or rdf:about attributes that identify CIM object elements. Default: ‘’
- name:
The name is any free human readable and possibly non unique text naming the object. Default: ‘’
- shortName:
The attribute is used for an exchange of a human readable short name with length of the string 12 characters maximum. Default: ‘’
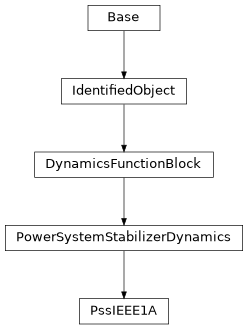
Inheritance Diagram: