cimpy.cgmes_v2_4_15.SynchronousMachineEquivalentCircuit module
- class cimpy.cgmes_v2_4_15.SynchronousMachineEquivalentCircuit.SynchronousMachineEquivalentCircuit(xad=0.0, rfd=0.0, xfd=0.0, r1d=0.0, x1d=0.0, xf1d=0.0, xaq=0.0, r1q=0.0, x1q=0.0, r2q=0.0, x2q=0.0, *args, **kw_args)[source]
The electrical equations for all variations of the synchronous models are based on the SynchronousEquivalentCircuit diagram for the direct and quadrature axes. = + = + * / ( + ) = + * * / ( * + * + * ) = + = + * / (+ ) = + ** / ( * + * + * ) = ( + ) / ( * ) = ( * + * + * ) / ( * * ( + ) = ( + ) / ( * ) = ( * + * + * )/ ( * * ( + ) Same equations using CIM attributes from SynchronousMachineTimeConstantReactance class on left of = sign and SynchronousMachineEquivalentCircuit class on right (except as noted): xDirectSync = xad + RotatingMachineDynamics.statorLeakageReactance xDirectTrans = RotatingMachineDynamics.statorLeakageReactance + xad * xfd / (xad + xfd) xDirectSubtrans = RotatingMachineDynamics.statorLeakageReactance + xad * xfd * x1d / (xad * xfd + xad * x1d + xfd * x1d) xQuadSync = xaq + RotatingMachineDynamics.statorLeakageReactance xQuadTrans = RotatingMachineDynamics.statorLeakageReactance + xaq * x1q / (xaq+ x1q) xQuadSubtrans = RotatingMachineDynamics.statorLeakageReactance + xaq * x1q* x2q / (xaq * x1q + xaq * x2q + x1q * x2q) tpdo = (xad + xfd) / (2*pi*nominal frequency * rfd) tppdo = (xad * xfd + xad * x1d + xfd * x1d) / (2*pi*nominal frequency * r1d * (xad + xfd) tpqo = (xaq + x1q) / (2*pi*nominal frequency * r1q) tppqo = (xaq * x1q + xaq * x2q + x1q * x2q)/ (2*pi*nominal frequency * r2q * (xaq + x1q). Are only valid for a simplified model where “Canay” reactance is zero.
- xad
D-axis mutual reactance. Default: 0.0
- rfd
Field winding resistance. Default: 0.0
- xfd
Field winding leakage reactance. Default: 0.0
- r1d
D-axis damper 1 winding resistance. Default: 0.0
- x1d
D-axis damper 1 winding leakage reactance. Default: 0.0
- xf1d
Differential mutual (Canay) reactance. Default: 0.0
- xaq
Q-axis mutual reactance. Default: 0.0
- r1q
Q-axis damper 1 winding resistance. Default: 0.0
- x1q
Q-axis damper 1 winding leakage reactance. Default: 0.0
- r2q
Q-axis damper 2 winding resistance. Default: 0.0
- x2q
Q-axis damper 2 winding leakage reactance. Default: 0.0
Documentation of parent class SynchronousMachineDetailed:
All synchronous machine detailed types use a subset of the same data parameters and input/output variables. The several variations differ in the following ways: It is not necessary for each simulation tool to have separate models for each of the model types. The same model can often be used for several types by alternative logic within the model. Also, differences in saturation representation may not result in significant model performance differences so model substitutions are often acceptable.
- saturationFactorQAxis
Q-axis saturation factor at rated terminal voltage (S1q) (>= 0). Typical Value = 0.02. Default: 0.0
- saturationFactor120QAxis
Q-axis saturation factor at 120% of rated terminal voltage (S12q) (>=S1q). Typical Value = 0.12. Default: 0.0
- efdBaseRatio
Ratio of Efd bases of exciter and generator models. Typical Value = 1. Default: 0.0
- ifdBaseType
Excitation base system mode. Typical Value = ifag. Default: None
- ifdBaseValue
Ifd base current if .ifdBaseType = other. Not needed if .ifdBaseType not = other. Unit = A. Typical Value = 0. Default: 0.0
Documentation of parent class SynchronousMachineDynamics:
Synchronous machine whose behaviour is described by reference to a standard model expressed in one of the following forms:
- SynchronousMachine
Synchronous machine to which synchronous machine dynamics model applies. Default: None
- TurbineGovernorDynamics
Synchronous machine model with which this turbine-governor model is associated. Default: “list”
- ExcitationSystemDynamics
Excitation system model associated with this synchronous machine model. Default: None
- MechanicalLoadDynamics
Mechanical load model associated with this synchronous machine model. Default: None
- GenICompensationForGenJ
Compensation of voltage compensator`s generator for current flow out of this generator. Default: “list”
Documentation of parent class RotatingMachineDynamics:
Abstract parent class for all synchronous and asynchronous machine standard models.
- damping
Damping torque coefficient (D). A proportionality constant that, when multiplied by the angular velocity of the rotor poles with respect to the magnetic field (frequency), results in the damping torque. This value is often zero when the sources of damping torques (generator damper windings, load damping effects, etc.) are modelled in detail. Typical Value = 0. Default: 0.0
- inertia
Inertia constant of generator or motor and mechanical load (H) (>0). This is the specification for the stored energy in the rotating mass when operating at rated speed. For a generator, this includes the generator plus all other elements (turbine, exciter) on the same shaft and has units of MW*sec. For a motor, it includes the motor plus its mechanical load. Conventional units are per unit on the generator MVA base, usually expressed as MW*second/MVA or just second. This value is used in the accelerating power reference frame for operator training simulator solutions. Typical Value = 3. Default: 0
- saturationFactor
Saturation factor at rated terminal voltage (S1) (> or =0). Not used by simplified model. Defined by defined by S(E1) in the SynchronousMachineSaturationParameters diagram. Typical Value = 0.02. Default: 0.0
- saturationFactor120
Saturation factor at 120% of rated terminal voltage (S12) (> or =S1). Not used by the simplified model, defined by S(E2) in the SynchronousMachineSaturationParameters diagram. Typical Value = 0.12. Default: 0.0
- statorLeakageReactance
Stator leakage reactance (Xl) (> or =0). Typical Value = 0.15. Default: 0.0
- statorResistance
Stator (armature) resistance (Rs) (> or =0). Typical Value = 0.005. Default: 0.0
Documentation of parent class DynamicsFunctionBlock:
Abstract parent class for all Dynamics function blocks.
- enabled
Function block used indicator. true = use of function block is enabled false = use of function block is disabled. Default: False
Documentation of parent class IdentifiedObject:
This is a root class to provide common identification for all classes needing identification and naming attributes.
- DiagramObjects
The domain object to which this diagram object is associated. Default: “list”
- mRID
Master resource identifier issued by a model authority. The mRID is globally unique within an exchange context. Global uniqueness is easily achieved by using a UUID, as specified in RFC 4122, for the mRID. The use of UUID is strongly recommended. For CIMXML data files in RDF syntax conforming to IEC 61970-552 Edition 1, the mRID is mapped to rdf:ID or rdf:about attributes that identify CIM object elements. Default: ‘’
- name
The name is any free human readable and possibly non unique text naming the object. Default: ‘’
- description
The description is a free human readable text describing or naming the object. It may be non unique and may not correlate to a naming hierarchy. Default: ‘’
- energyIdentCodeEic
The attribute is used for an exchange of the EIC code (Energy identification Code). The length of the string is 16 characters as defined by the EIC code. References: Default: ‘’
- shortName
The attribute is used for an exchange of a human readable short name with length of the string 12 characters maximum. Default: ‘’
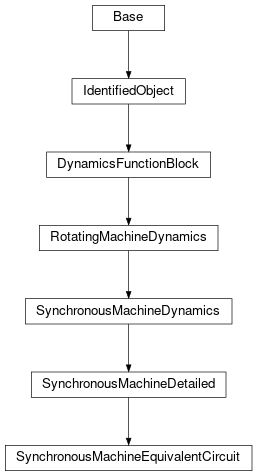
Inheritance Diagram: